
_
_
_

_

 precedente
precedente successivo
successivo
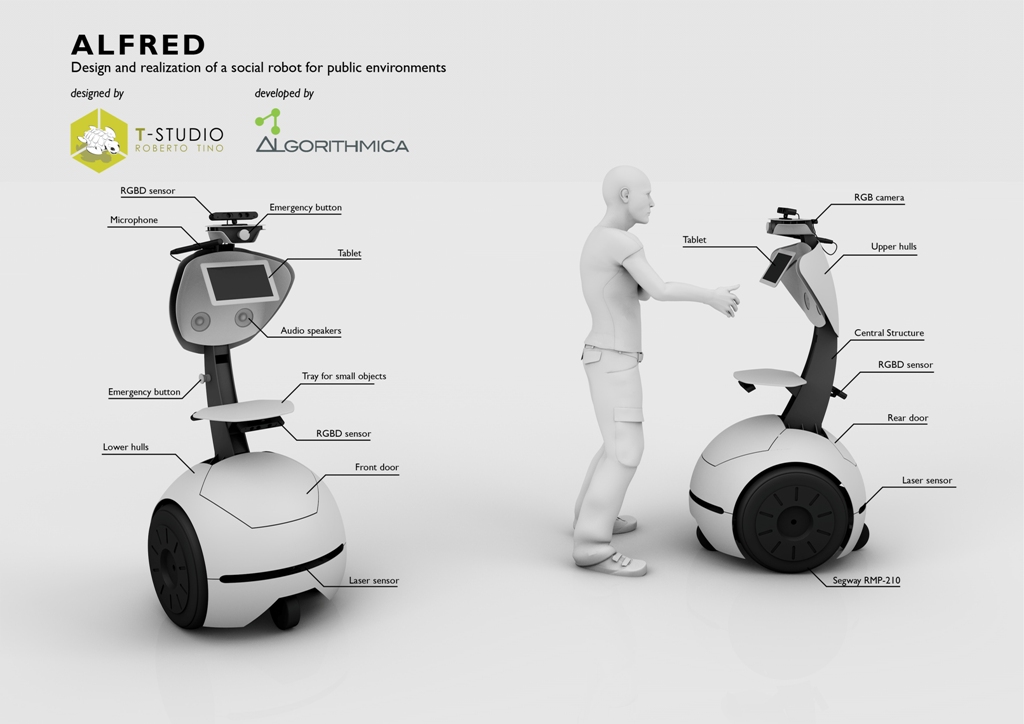
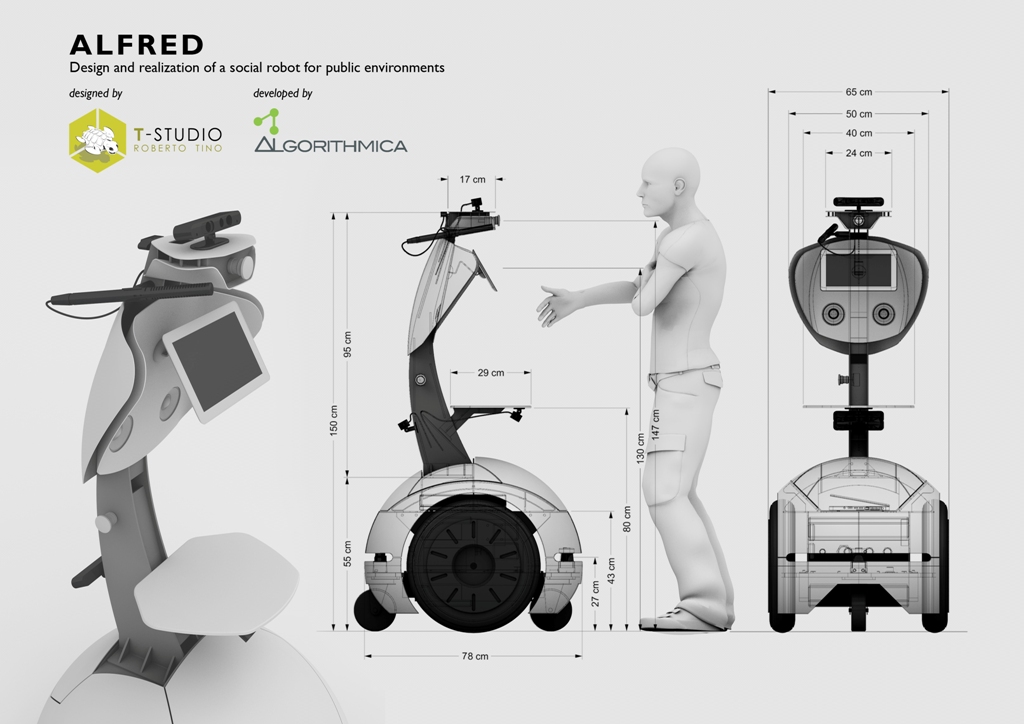
Alfred
Developed with:
. COACHES project
. Algorithmica S.r.l.
. Dept. of Computer, Control and Management Engineering Sapienza University of Rome, Italy;
. GREYC, University of Caen Lower-Normandy, France;
(2014/2015)
Description
...
 Portfolio
Portfolio